I’m a second-year M.Sc. student at SUSTech, advised by Prof. Hong Zhang.
I am a robotics perception researcher, dedicated to enabling robots to better perceive 3D environments, thereby improving their performance in downstream tasks such as scene understanding, navigation, and grasping. To achieve this goal, I am currently focused on: (a) SLAM; (b) Differentiable dense map representations.
📝 Publications
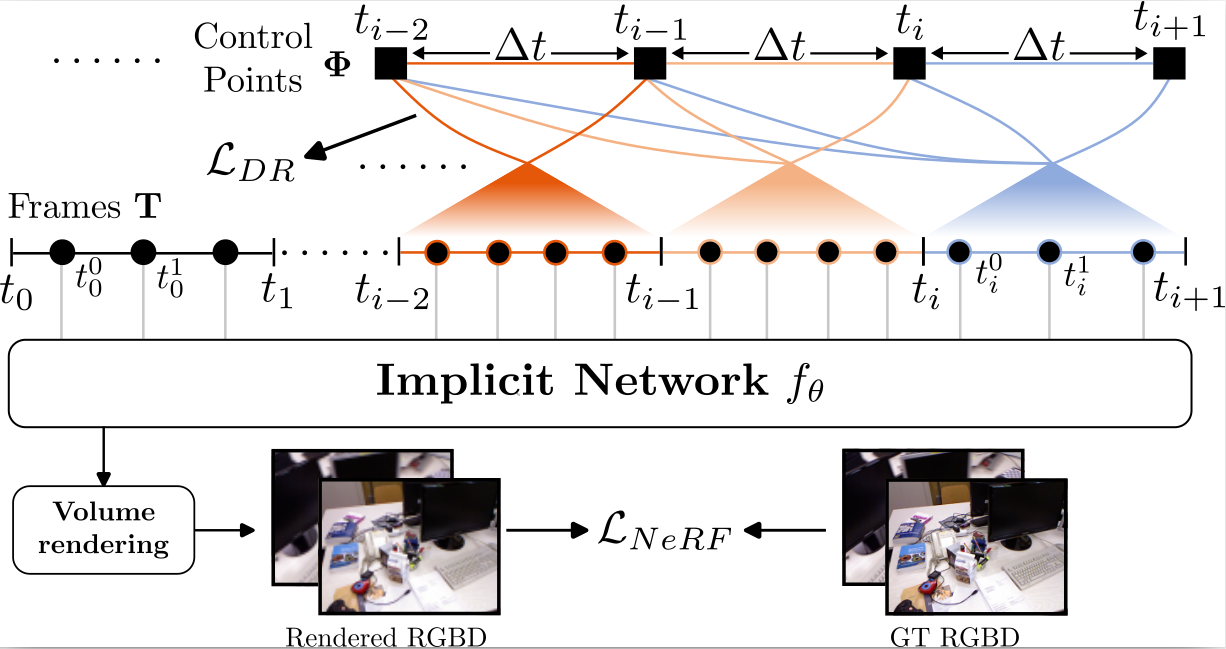
Optimizing NeRF-based SLAM with Trajectory Smoothness Constraints
Yicheng He, Guangcheng Chen, Hong Zhang
- Identified the lack of trajectory smoothness in NeRF-SLAM due to missing explicit constraints.
- Proposed a B-spline trajectory representation and jointly optimized it with NeRF to achieve smooth camera motion.
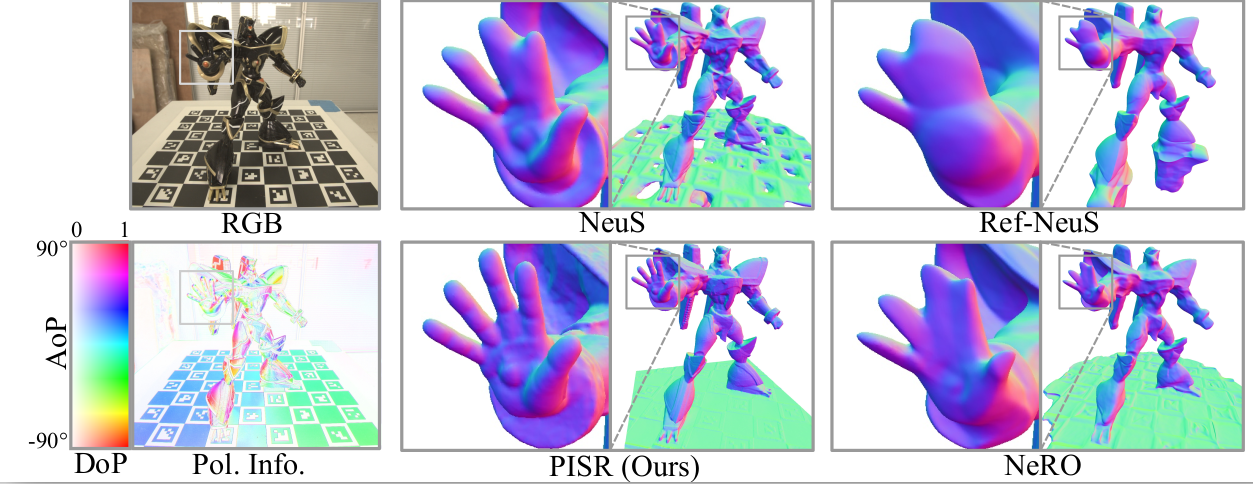
Pisr: Polarimetric neural implicit surface reconstruction for textureless and specular objects
Guangcheng Chen, Yicheng He, Li He, Hong Zhang
- Identified radiance-color ambiguity in NeRF methods, leading to poor reconstruction of textureless or reflective objects.
- Integrated polarization cues and a normal-based loss to enhance NeRF optimization and reconstruction quality.
🎖 Honors and Awards
2021.09 – 2023.09
National Second / Third Prize in the RoboMaster National University Students' Robotics Competition.
📖 Educations
- 2023.09 - 2026.06 (Expected), M.Sc., Southern University of Science and Technology.
- 2019.09 - 2023.06, B.Eng., Guangdong University of Technology.
💻 Internships
- 2025.05 - 2025.08, Astribot, Shenzhen, China.